The boat controller is finished and it’s going to be tested on a hobby model boat. The Navigation Board revealed in the previous post is designed to be universal for any autonomous boat. In the picture below, it’s mounted on top of Expansion Board that will provide additional functions more specific to the boat. This modular design allows to make quick modifications on the Expansion Board while keeping the more complex Navigation Board unchanged.
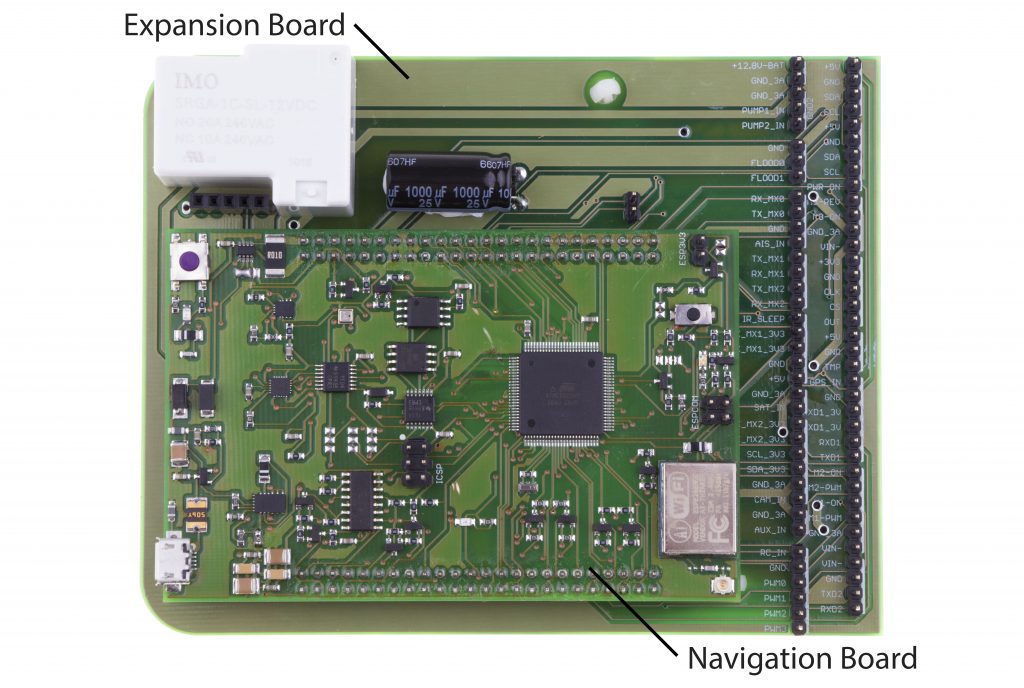
What has been added:
- Watchdog timer based on a low-power microcontroller that monitors the “heartbeat” of the main CPU. If the Navigator doesn’t respond for a minute or it reports any kind of failure, the watchdog will cut power for a few seconds. This is how we usually fix problems. 🙂
- BFC (Big Freaking Capacitor) to suppress noise.
- Easy connections for all additional hardware components. All wires will be directly soldered to the pins.
- A couple of MOSFET switches to turn on particular hardware only when needed: Linux computer with a camera, satellite modem, AIS receiver (for collision avoidance), RC receiver and water pumps. Wondering what the water pumps are for? They will pump water out of the boat if flood sensors detect big trouble…
- The Power Sensor will measure voltage and current of each solar panel separately. It will be interesting to see which panel is shaded by the sail at any particular time.
Shared with love: