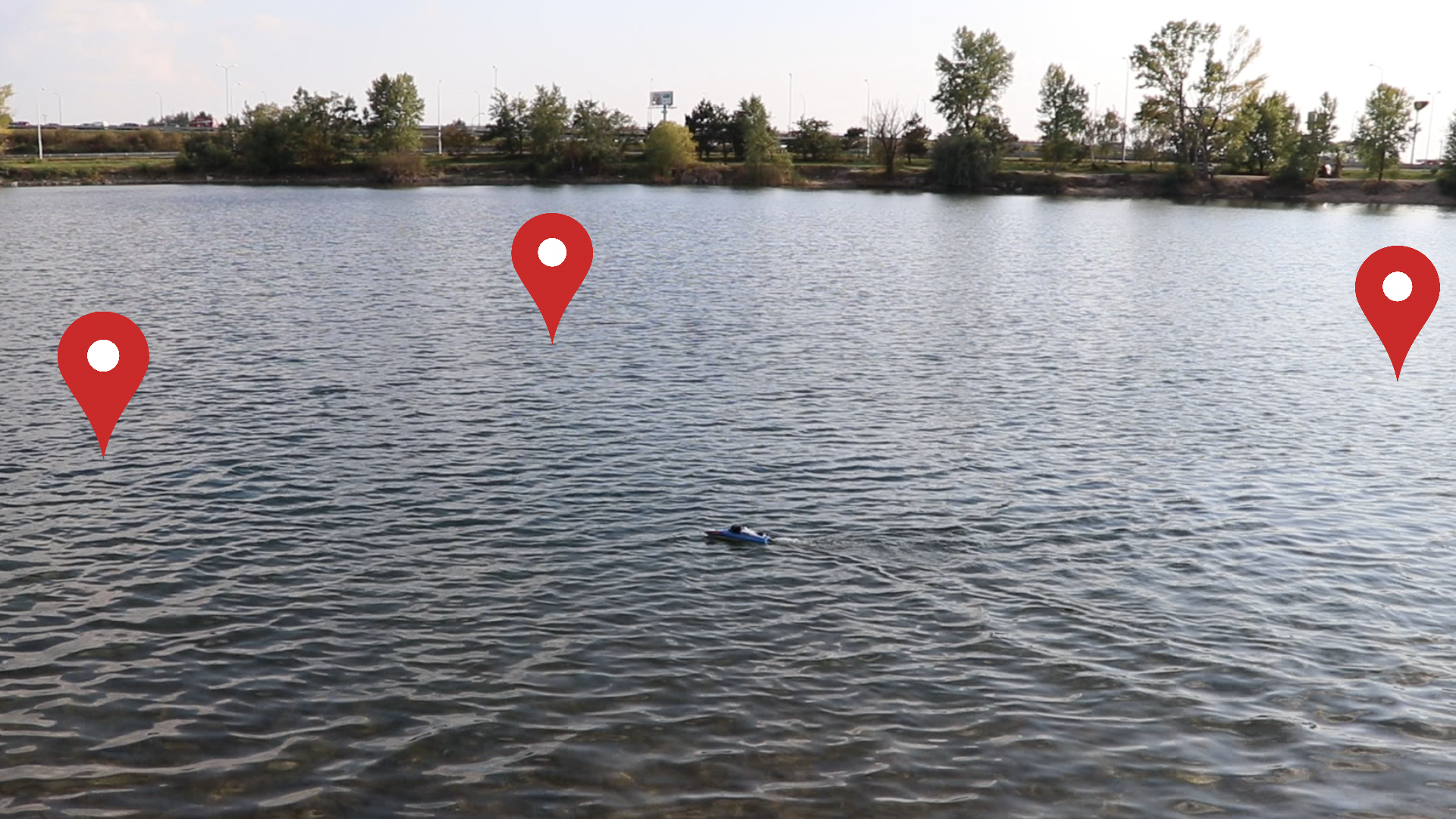
The navigation controller has been tested on a hobby RC boat which was navigating through multiple waypoints on a lake. Different approaches were evaluated to find the best algorithm working at high speeds. Stability at high speeds would be difficult to test with a sailboat as the winds in the middle of the ocean can be much stronger. The algorithm also calculates the heading from GPS just in case the compass fails.
I am taking a different approach before the next transatlantic attempt – every single component is thoroughly tested. I can’t tell if the boat will be completed this year. There’s no need to rush. The goal is to launch a capable boat that has a good chance of crossing the Atlantic.
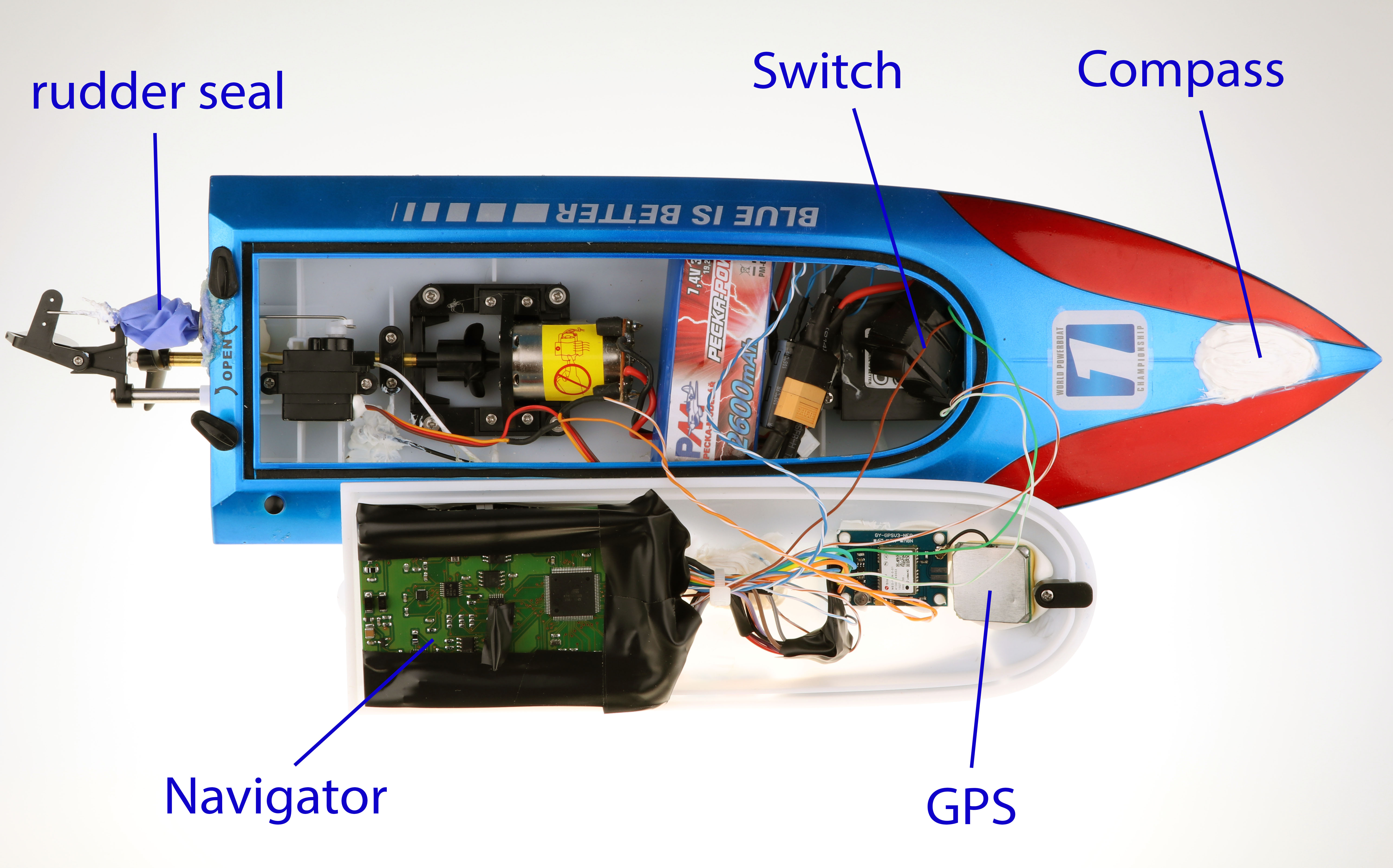
Converting a toy boat into an autonomous boat