Over the past few years, there were several autonomous boats in which the autopilot stopped working just because some water entered the hull. It won’t happen with this boat. Because all the electronics is enclosed in a waterproof housing, it will remain fully functional even if the hull is flooded.
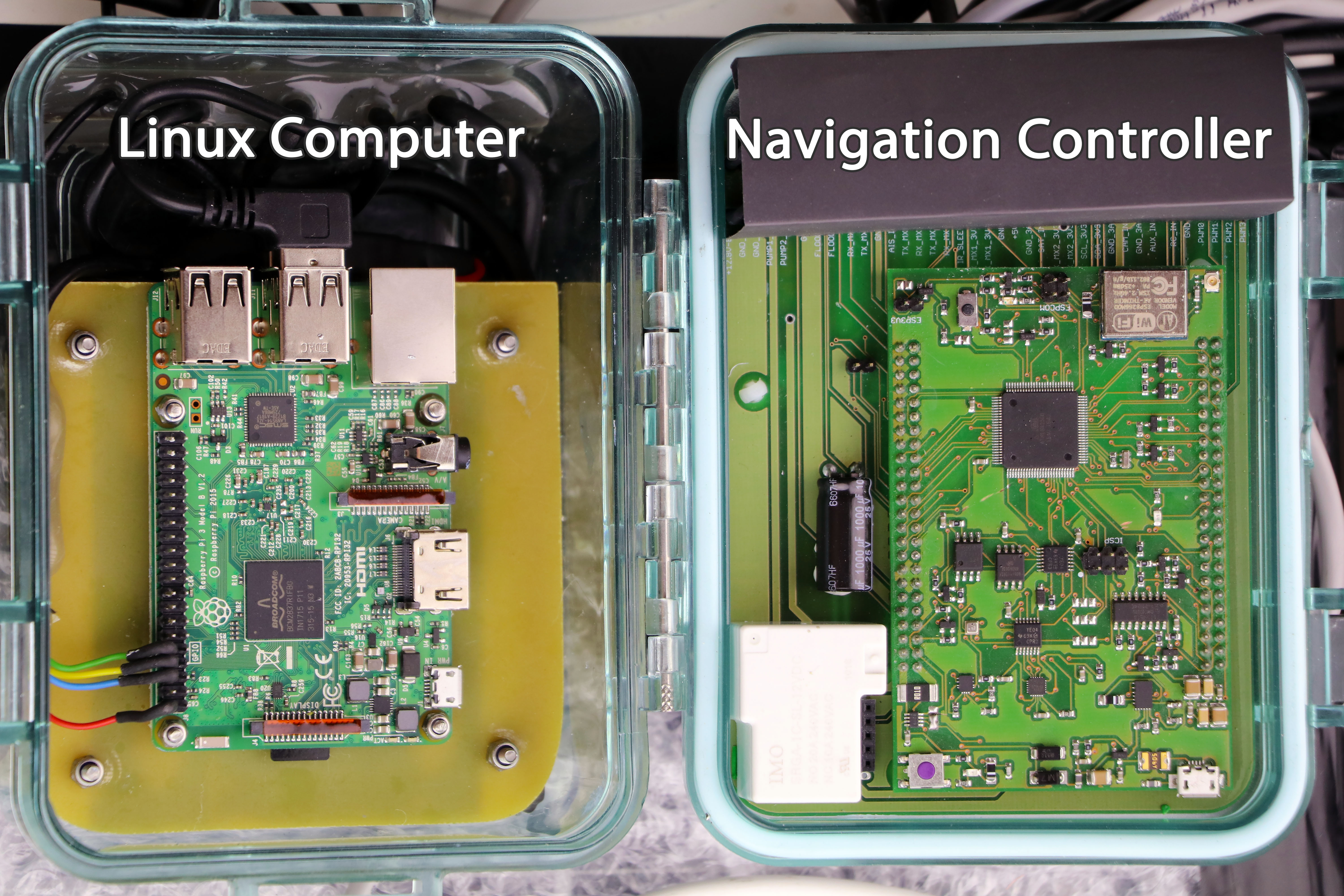
The electronics is enclosed in a waterproof polycarbonate case. The Linux computer on the left (Raspberry Pi) will record short videos or take pictures from USB camera and store them on an SD card. It may also send compressed pictures through a satellite modem on request. Because Raspberry Pi is power hungry, it will be switched on only when needed.
The custom-built Navigation Controller on the right has been published on GitHub:
https://github.com/OpenTransat/OpenTransat-Navigator
https://github.com/OpenTransat/OpenTransat-Expansion
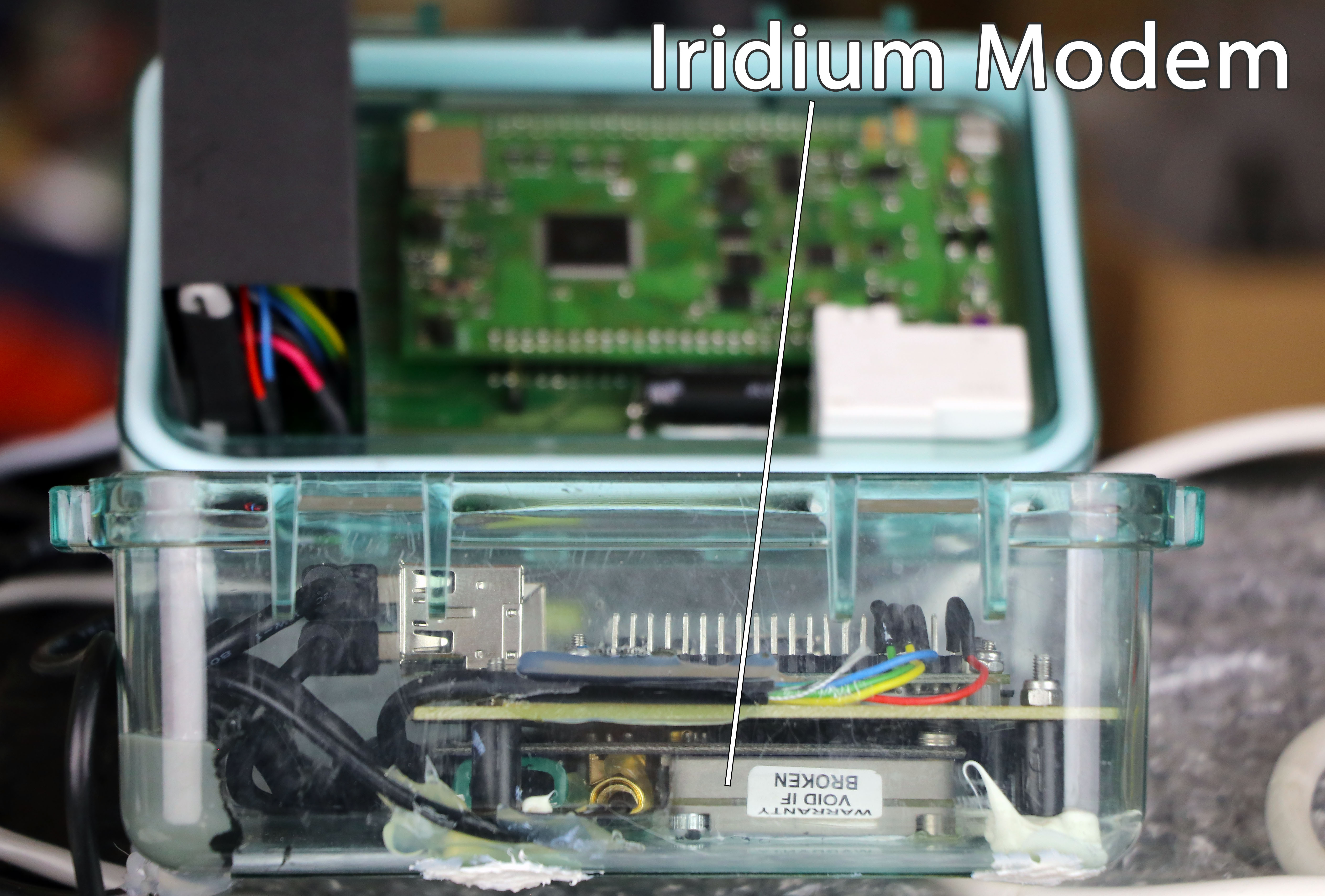
The Iridium satellite modem (RockBlock) is for transmitting short text messages like GPS position, battery voltage, power output of individual solar panels, data from different sensors, etc.
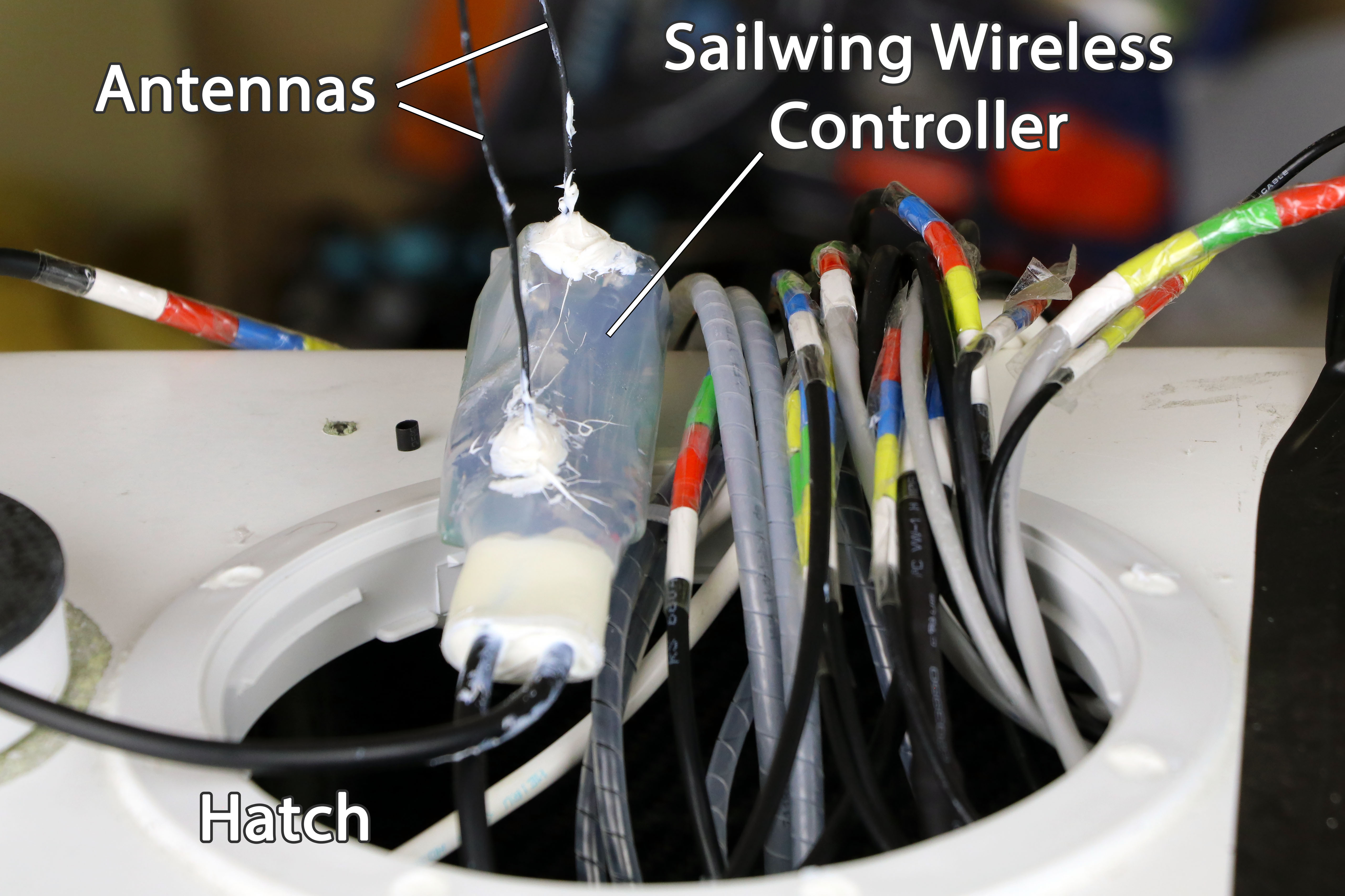
The polycarbonate case can be easily pulled out through the hatch in order to access the electronics.
The sailwing wireless controller will be located somewhere inside the hull as close to the sailwing as possible. It’s waterproofed with a heatshrink and silicone.
I find the color codes on the cables very useful to prevent wiring errors.
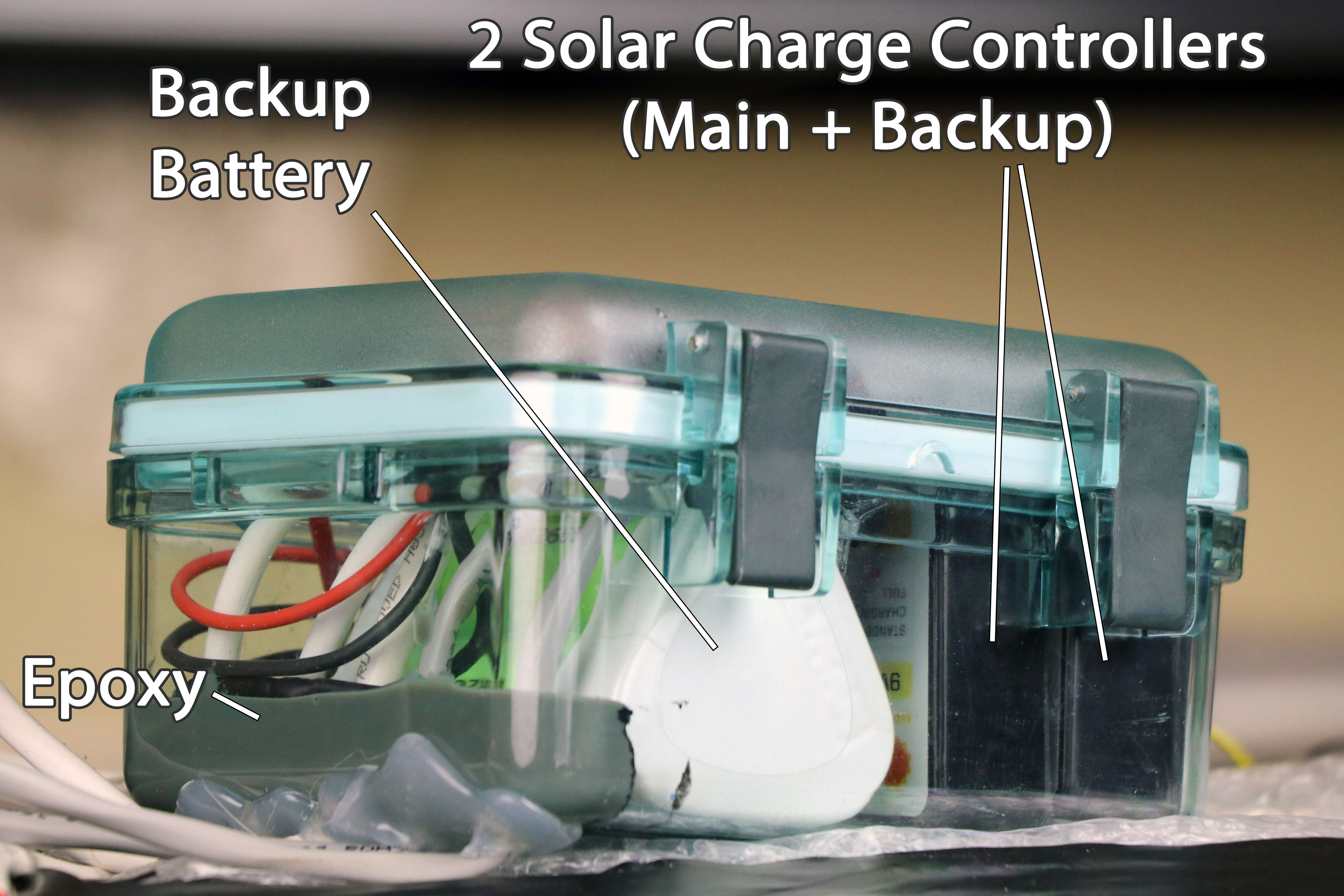
The second polycarbonate case protects a backup battery (LiFePo4 9.6V/2500mAh) that’s independently charged by a secondary solar charge controller. The backup battery will provide power for the secondary tracker that will keep transmitting the boat location even if the main power source fails.
The epoxy-sealed cable pass-through makes the housing perfectly waterproof for full submersion.

The waterproof connectors are used as switches to disconnect all power sources from the electronics.
The solar power sensor is a PCB potted in a thermally conductive epoxy. Its function is measuring power output of individual solar panels and reporting the data to the main controller. It must be kept outside the polycarbonate housing as the blocking diodes may get pretty hot. More details on GitHub:

This is the USB camera that’s connected to the Linux computer. It was built a while ago.