It can act as a backup wind sensor which is less accurate, but more robust. For example, I was told that the ultrasonic wind sensor may not work correctly in a heavy rain or when the boat is heeling too much. The algorithm will constantly compare the sailwing position with the wind direction. If there’s a big difference, it means that something is wrong with the wind sensor and the wind direction will be taken from the sailwing position.
Magnetic encoder is very sensitive to misalignment, so I had to come up with an alternative solution.

There will be 16 Hall sensors around the mast which will track a magnet mounted at the bottom of the sailwing. The accuracy is 360 / 32 = 11 degrees or even less with some calibration.
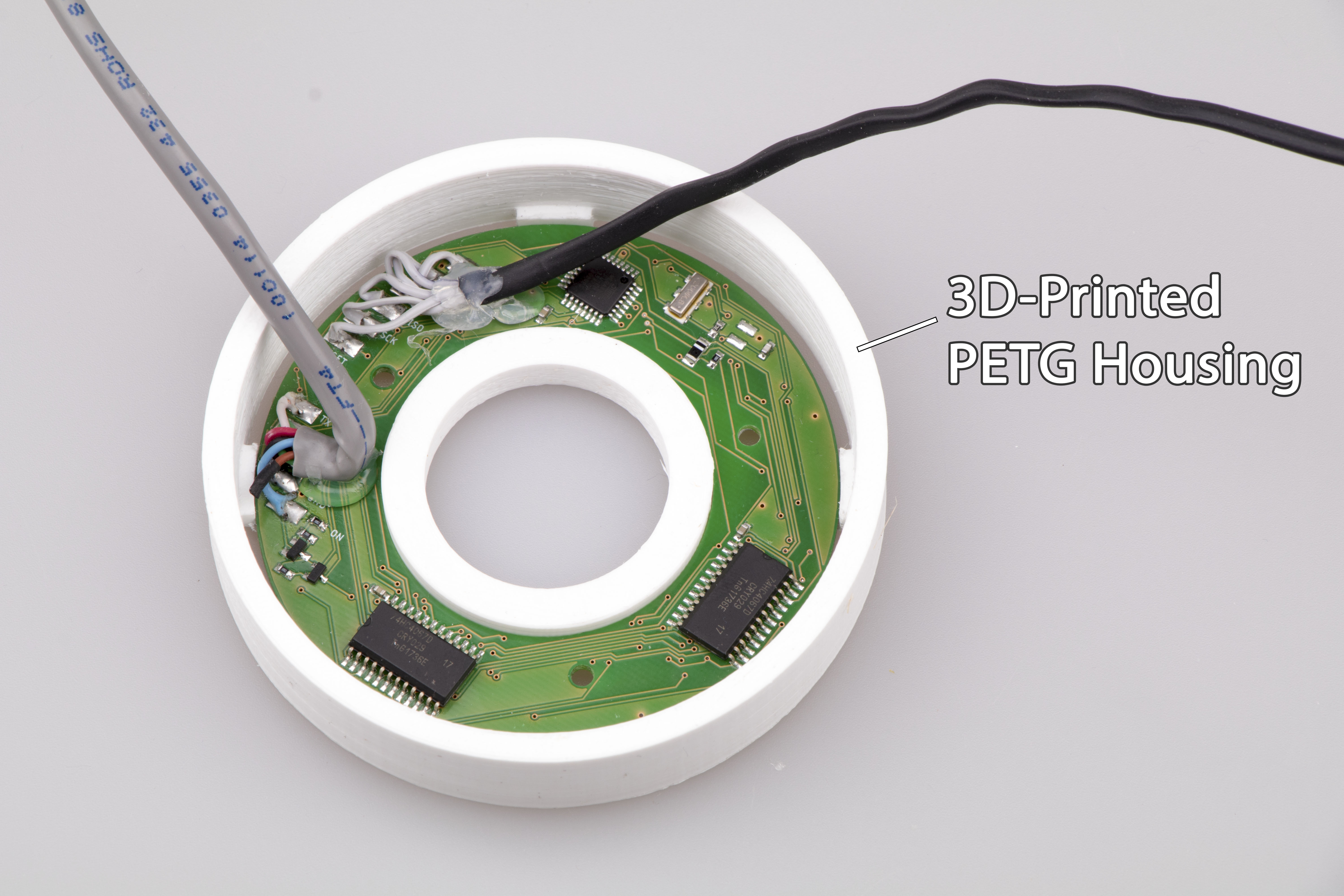
There is a small CPU that switches between the Hall sensors, crunches the data and sends the result through a serial cable to the main controller. The second cable is for programming.
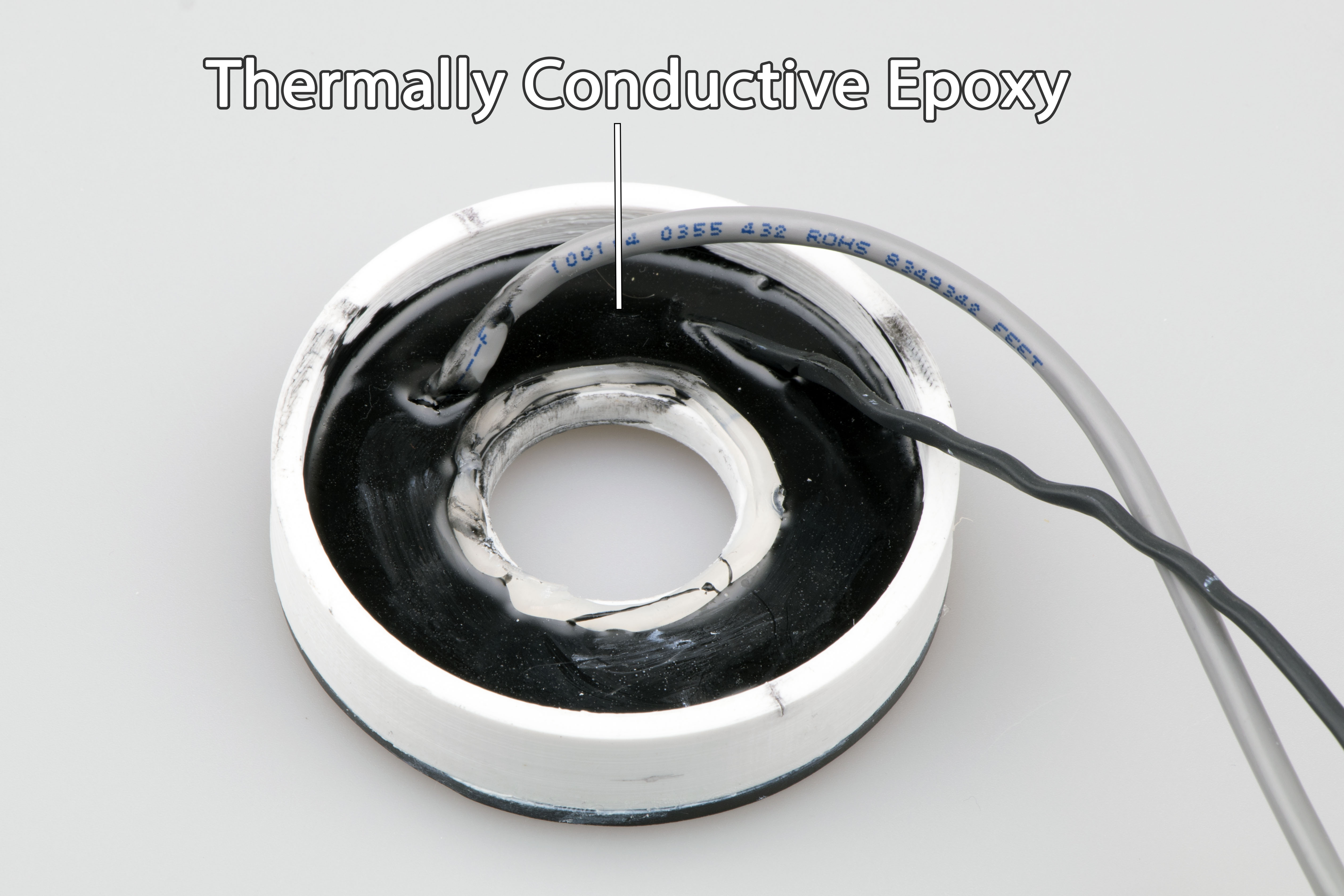
The PCB is potted in a thermally conductive epoxy, making it perfectly waterproof and shockproof.